در این پروژه برای مدل تابع تبدیل کنترل کلاسیک، کنترل مدرن و کنترل بهینه در دو حالت زمان پیوسته و زمان گسسته طراحی شده است. ابتدا کنترل PID پیوسته طراحی شده و سپس PID دیجیتال و سپس رفتار سیستم نسبت به دو حالت مقایسه شده و در مرحله بعد کنترل فیدبک حالت و مشاهده گر و کنترل فیدبک با مشاهده گر طراحی شده و همچنین حالت های سیستم را با مشاهده گر مقایسه شده اند و تاثیر نویز و تغییر پارامتر ها روی رفتار سیستم بررسی شده است. سپس کنترل فیدبک حالت زمان گسسته، مشاهده گر آن و کنترل فیدبک حالت زمان گسسته همراه با مشاهده گر طراحی شده اند و حالت های سیستم را با مشاهده گر مقایسه شده اند. اثر نویز و تغییر پارامترها را روی این طراحی ها بررسی شده است و در آخر کنترل فیدبک حالت بهینه با تابع هزینه دلخواه طراحی شده است و رفتار سیستم با این طراحی را در حضور نویز بررسی شده است. نتیجه ای که گرفته ایم این است که کنترل PID در حذف نویز از سایر طراحی ها موفق تر بوده و کنترل فیدبک حالت نسبت به تغییر پارامترهای سیستم مقاوم تر بوده و از نظر سرعت رسیدن به حالت مانا، SVFC سریع ترین پاسخ را داشته است.
پروژه طراحی کنترلر کلاسیک، کنترل مدرن و کنترل بهینه برای مدل تابع تبدیل در حالت های زمان پیوسته و زمان گسسته و مقایسه آنها در محیط کد نویسی در MATLAB، مشتمل بر 57 صفحه، تایپ شده، به همراه روابط ریاضی و تصاویر با فرمت pdf جهت دانلود قرار داده شده و به ترتیب زیر گردآوری شده است:
- طراحی کنترل کننده PID زمان پیوسته
- ﻧﻮﺷﺘﻦ ﻣﻌﺎدﻻت ﺣﺎﻟﺖ ﺳﯿﺴﺘﻢ
- ﻃﺮاﺣﯽ ﮐﻨﺘﺮﻟﺮ PID ﺑﺎ اﺳﺘﻔﺎده از روش astrom
- نمودار های حوزه فرکانس کنترلر طراحی شده
- ترسیم ورودی کنترلی به Plant
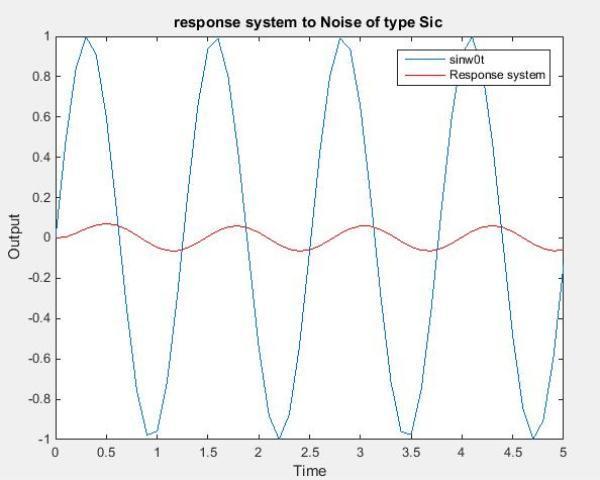
- بررسی رفتار سیستم در حضور نویز و تغییر پارامترهای سیستم
- نویز ثابت
- نویز سینوسی
- تغییر پارامتر
- طراحی کنترلر دیجیتال PID
- طراحی کنترل کننده PID با استفاده از روش astrom
- نمودارهای حوزه فرکانس کنترل کننده طراحی شده
- ورودی کنترلی به plant
- بررسی رفتار سیستم در حضور نویز و تغییر پارامترها ی سیستم
- نویز ثابت
- نویز سینوسی
- تغییر پارامتر
- مقایسه عملکرد PID دیجیتال و PID زمان پیوسته
- کنترل فیدبک حالت و مشاهده گر
- طراحی SVFC
- طراحی مشاهده گر
- ترسیم حالت های سیستم و تخمین آنها
- طراحی SVFC با مشاهده گر مرتبه کامل
- بررسی رفتار سیستم با حضور نویز و تغییر پارامترهای سیستم
- نویز ثابت
- نویز سینوسی
- تغییر پارامتر های سیستم
- مقایسه ورودی کنترلی SVFC با ورودی کنترلیSVFC ومشاهده گر
- مقایسه SVFC با PID
- طراحی FTSC ، FTSC FTSO
- تبدیل سیستم به سیستم دیجیتال و استخراج معادلات حالت آن
- طراحی FTSC
- طراحی FTSO و ترسیم حالت های سیستم و تخمین انها و خطای آنها
- طراحی مشاهده گر دیجیتال و ترسیم حالت ها و تخمین ها
- ترسیم حالت های سیستم و تخمین آنها زمان پیوسته و زمان گسسته در یک نمودار
- طراحی FTSFTSO
- بررسی رفتار سیستم در حضور نویز
- نویز ثابت
- نویز سینوسی
- نویز سفید
- بررسی رفتار سیستم با تغییر پارامترهای سیستم
- بررسی ورودی کنترلی FTSC با ورودی کنترلی FTSCFTSO
- مقایسه FTSC با کنترلر PID دیجیتال طراحی شده در بخش دوم
- کنترل بهینه
- طراحی SVFC بهینه
- رفتار سیستم در حضور نویز
- مقایسه پاسخ پله سیستم با طراحی های LQR ،SVFC ،FTSC ،PID
- نتیجه گیری

جهت دانلود پروژه طراحی کنترلر ، کنترل مدرن و کنترل بهینه برای مدل تابع تبدیل در حالت های زمان پیوسته و زمان گسسته و مقایسه آنها در محیط کد نویسی نرم افزار Matlab به لینک زیر مراجعه نمایید:
طراحی کنترل مدرن و کنترل بهینه برای مدل تابع تبدیل
بررسی میزان تاثیر اندازه ابزار و نرخ پیشروی بر عمر ابزار
جزوه آموزشی خطرات مواد شیمیایی
تحليل و طراحي برنامه نت در سيستم های توليد ايستگاهی بوسيله شبيه سازی
کتاب ارزیابی لرزه ای و بازسازی ساختمان های موجود
مشخصات
- تولید و فروش گچ پلیمری
- webdes
- داروخانه پلاس | داروخانه آنلاین شبانه روزی
- ترشیز وب
- بانک اطلاعات مشاغل
- لباس زیر شیردهی نخی یقه دار زنانه خالدار
- تیم والیبال کاراسونو
- تک تاک
- شرکت کالای صنعت نفت
- محصولات کیهان
- delsatecco.rozblog.com
- قفل دیجیتال
- فارسروید
- beroozha
- Rank2Game
- پویان اسکنر
- lilini
- تعمیر و فروش
- kiamehr85
- دانلود رایگان کتاب
- ویلم
- پچ لیگ برتر ایران
- تفریحی و دانلود
- کنترلی کردن درب آپارتمان
- فن کویل